1、故障现象
一辆2008年出厂的3.0L宝马X3,底盘代号为E83,行驶了15 0871km。车主反映:该车仪表台上的四驱系统故障灯以及安全气囊警示灯点亮。
2、故障诊断与排除
通过与车主交流得知,该车已在其他维修厂进行过检查,但未更换过任何部件,只是对转向角度传感器进行了匹配校准。由于完成匹配工作后故障灯熄灭,且故障现象未再现,之前的维修厂也就草草交车,没料到车主继续行驶后故障灯又再次点亮,遂进本厂检修。
根据故障车的故障现象及车主描述,笔者起初认为四驱系统故障警示灯似乎与安全气囊警示灯并无直接关联,但查阅了宝马X3 E83的车载网络系统图(图1),发现该车动力传动及四驱控制的模块都是通过PT-CAN高速网络线与车辆仪表(网关)相连,并进行通信。车载网络系统图中的MRS4RD模块,即多方位乘员保护系统控制单元主要负责车内的被动安全系统控制,如安全气囊,该模块通过K-BUS低速网络线与SVT电子伺服式助力转向系统进行通信,同时也通过仪表(网关)与车辆其他模块进行通信。也就是说,该车四驱系统内部信号错误也会影响安全气囊系统的信号数据错误,从而导致安全气囊警示灯也同时点亮。基于此,笔者决定重点检查四驱系统。
图1 宝马X3 E83车载网络系统
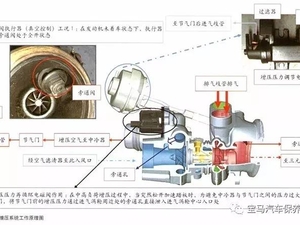
宝马的四驱系统xDrive(图2)是一种用于控制和调节前后桥驱动扭矩分配的系统。DSC动态稳定控制系统将测量值提供给xDrive使用,同时也受行驶性能变化的影响。该系统利用可控的多片式离合器解决牵引力和行驶性能之间的矛盾,因此xDrive系统不是按照固定的比例来分配扭矩,而是由分动器中的受控多片式离合器中的离合器锁止扭矩和前后桥上可传输的扭矩来决定的。

图2 宝马四驱系统xDrive控制原理
宝马的xDrive系统的核心部件是分动器(图3)。当分动器中的多片离合器分离时,驱动扭矩不会被传输到前桥上,而是所有驱动扭矩被传输到后桥主减速器上;当多片式离合器完全闭合时,则前桥和后桥以相同的转速旋转,而扭矩大小的分配则根据每个车桥上可支持的扭矩来决定的。例如:当红灯变成绿灯时,车辆以1挡油门全开起步时,由于车桥负荷会出现转移,后桥会承担较高的车桥负荷,同时也会被分配较高的驱动扭矩。这意味着当前后桥的摩擦系数相同时,可传输的驱动扭矩与车桥负荷分配一致。如果前桥位于摩擦系数较高的平面,而后桥位于冰面等摩擦系数较小的平面时,则前桥被分配的扭矩要高于后桥,极端情况下甚至会出现所有扭矩都被分配至前桥,而后桥上的扭矩几乎为0。这样就使得车辆能够在极端路面状况下也有较强的行驶驱动力。控制多片离合器的执行器是分动器伺服电机,而伺服电机又被分动器控制单元VGSG所控制。

图3 宝马xDrive系统分动器
电子元器件被集成在分动器控制单元中。分动器控制单元从DSC控制单元接收关于当前所需的离合器扭矩的信息,该信息被转化成伺服电机相应的旋转动作。锁止扭矩决定了前后桥上的驱动扭矩分配,而锁止扭矩则是根据驾驶员命令以及更高一级的防滑控制和动态行驶调节器计算而来的。为了让伺服电机的角度位置与离合器锁止扭矩准确对应,同时考虑磨损的影响,汽车发动机在停止工作后系统将进行一次基准运行。在基准运行期间,离合器被完全结合和分离一次。在分离和结合时,对伺服电机的每个角度位置都进行一次耗电量的测量,从而计算出离合器闭合的起始和终止时机。角度位置是由集成在伺服电机中的霍尔传感器确定的。
在分动器控制单元VGSG内安装有一个应急行驶调节器,作为DSC控制单元中的分动器离合器控制的备用控制装置。这样,即使重要传感器信号缺失或DSC控制单元失灵时,也能尽可能保证获得四轮驱动功能。应急行驶调节器包括两个调节模块:预控制模块和防滑模块。对防滑控制系统起决定作用的是车轮转速信号,而对预控制起决定作用的是来自于转向角和偏转率信号。如果单个传感器信号失灵,系统将计算出替代值,并利用扩展的调节阀值执行相关的功能,系统将一直按照这种工作方式,直到无法再提供有效的四轮控制为止。此时,组合仪表中的四驱系统故障指示灯也会随之点亮。
由上述的控制原理可以大致判断,故障车的xDrive系统进入了应急响应模式才会点亮四驱系统故障灯。接下来,我们将通过进一步检测以确定是传感器信号出现了问题,还是控制单元控制信号的问题,或者是分动器机械故障,引发系统报警。
通过宝马原厂诊断软件ISTA对车辆内部模块进行详细检测后,果不其然,我们看到了预想当中的故障代码:5EF4-DSC(转向角传感器内部故障)。
根据该故障代码可以初步判断是转向角度传感器的信号出现了错误,使得xDrive系统进入了应急模式,从而点亮了四驱系统的故障灯。至此,诊断方向已基本明确,但仍然不能确定是传感器内部故障产生的信号错误,还是转向角信号在传输的过程中出现了错误。当然,也可能传感器信号及传输线路都没有问题,而DSC控制单元在处理信号时出现了问题,也不排除是分动器的伺服电机及内部的机械故障。
由于先前的维修厂对转向角度进行了校准后,故障现象曾经消失过,我们再次进行了转向角度校准,故障警示灯确实熄灭,故障被排除。为谨慎起见,我们没有急于交车,而是进行了路试。起初故障灯并未点亮,但就在行驶一段距离并做大幅度转向后,四驱系统及安全气囊警示灯再次点亮,故障重现。
为了查明故障点,我们参照电路图(图4),对转角传感器及周边电路进行了如下检测。
图4 转向角传感器电路图
1.检测DSC控制单元的供电搭铁情况。打开点火开关测量1号脚,电压12.3V,正常。测量5号脚,搭铁正常。因此判断DSC模块供电正常,但是否能处理转向角度信号还不得而知,暂时无法检测,后续再用排除法来判断。
2.从车载控制网络电路图(图5)来看,转向角度传感器的CAN-H与CAN-L信号线通过X1893、X1894节点与DSC控制单元的3、4号脚相连接,测量该段线路的通断情况,结果正常。
图5 车载控制网络电路图
3.检测转向角度传感器3、4号脚信号输出的情况,以判断是传感器故障,还是DSC模块故障。在检测的过程中我们发现转向角传感器输出的信号值时而正常(CAN-H:2.7V;CAN-L:2.3V),时而不正常(CAN-H:2.3V;CAN-L:2.0V)。为进一步验证,我们拆解了转向角度传感器,发现该传感器的滑动触点已磨损(图6),导致其输出信号错误,影响了xDrive系统的运行计算。
图6 转向角传感器滑动触点已磨损
更换转向角度传感器,并对其进行编程及匹配后,再删除故障码,经反复试车,四驱系统及气囊警示灯均未再点亮。
因我们之前通过车载网络图及后续的具体原车电路图我们可以得知MRS4RD模块,即多方位乘员保护系统控制单元的CAN线与转向角度传感器的CAN线是共通的,也正是因为转向角度传感器的信号失准,导致了MRS4RD模块接收到了错误的通信信号,因此导致了安全气囊灯的点亮,而且为了慎重起见我们也对MRS4RD模块的供电、搭铁进行了测量,结果均为正常。至此,该车的四驱及气囊故障得以圆满排除。
3、维修小结
其实对于转向角度传感器的故障之前在宝马760 E66车型上也遇到过,只是那台车报的是主动转向故障。但是通过原理的理解与分析,我想不管是报4X4故障、安全气囊故障还是主动转向等,都会有相应的检修思路以及方向,怕的就是维修人员对车辆控制原理不太清楚的情况下盲目地去维修,导致后续走了很多弯路甚至无法排除故障。还有就是身为维修人员的我们一定要有工匠精神,在没有百分百确定故障点之前切勿应付车主盲目交车,这样其实对于自己包括客户的满意程度都会受到很大的影响,在当前客户至上的理念下还是要相当的严谨。望此维修案例可以给维修工们更多的启示。
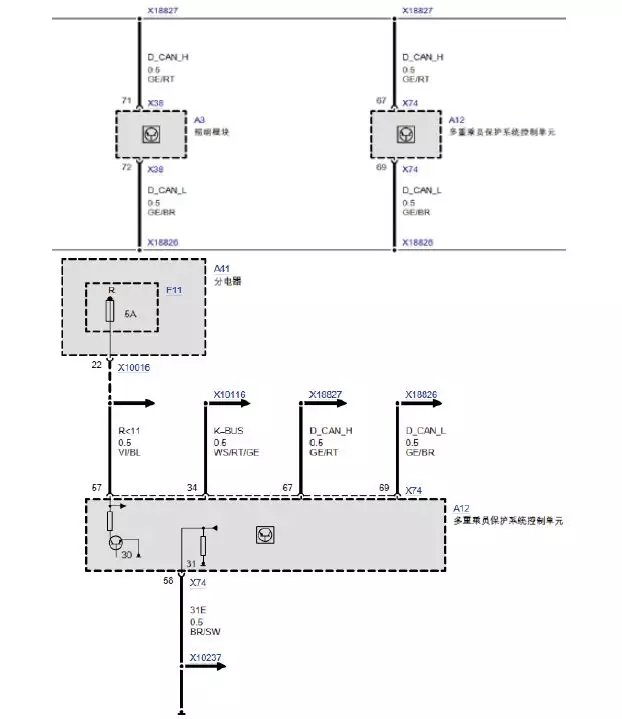
图7 多重成员保护系统电路图
专家点评
陶建业此文作者非常有意思,在确认车辆故障现象后,不是先从车辆故障存储器记录着手分析,而是从故障现象展开了知识分享,普及了此款车的四驱系统Xdrive的相关知识,棒棒哒!
随着车辆安全性能、舒适性、操控性能的不断提高,车载网络架构中的模块也随之增加,有些车辆的模块数量已经攀升到三位数,给维修带来了新的挑战。很多时候根据故障现象无法下手或被引入误区,只有通过专用诊断仪器及诊断设备来辅助才能迅速锁定故障。在该案例中,用诊断仪器可以清楚地看到转向角传感器内部故障,但根据经验,作者从四驱xdr ive系统开始检查,把转向角传感器的检查留到了最后,这个“包袱”抖得有些晚。
另外,需要特别指出的是,在网路总线中,不是离得近才能相通。不同类型网络总线间信号必须经过网关翻译后才能共享,某条总线上的传感器信号就是通过网关翻译后用于多个系统,信号异常后就会直接导致多个模块故障指示灯报警,此案例就是转向角度信号异常后导致多个故障灯报警的。但一个模块可以同时和两类总线进行通信,此车SVT电子伺服式助力转向模块就是很好的例子,同时是K-bus的客户还有PT Can的用户。